Científicos de la Nanyang Technological University (NTU) en Singapur, con el apoyo de la Agencia de Ciencia y Tecnología de Japón (JST), han construido la primera «línea de fábrica» automatizada de insectos-cyborg del mundo. Este sistema robótico prototipo automatiza la delicada tarea de acoplar mochilas electrónicas en miniatura a las cucarachas silbadoras de Madagascar, convirtiéndolas en robots híbridos insecto-computadora.
Este avance supera uno de los mayores obstáculos para su uso práctico: la producción en masa. Al reducir drásticamente el tiempo de preparación y el error humano, este hito marca un paso decisivo hacia el despliegue a gran escala de estos agentes en escenarios del mundo real.
El desafío: de la cirugía manual al ensamblaje de precisión
Hasta ahora, la creación de un insecto-cyborg era un proceso artesanal, lento y delicado. Un técnico experto debía implantar manualmente electrodos en partes específicas del sistema nervioso del insecto , un procedimiento que podía tardar unos 15 minutos y cuyo éxito dependía enormemente de su habilidad. La fragilidad de la anatomía del insecto hacía que el proceso fuera poco escalable para aplicaciones que requieren cientos o miles de unidades, como la búsqueda y rescate tras un desastre.
Para superar este reto, el equipo de investigación, liderado por el Profesor Hirotaka Sato de la Escuela de Ingeniería Mecánica y Aeroespacial de la NTU, se centró en dos innovaciones clave: un nuevo método de control de movimiento y un sistema de ensamblaje totalmente automatizado.
Una nueva forma de «conducir» a un insecto
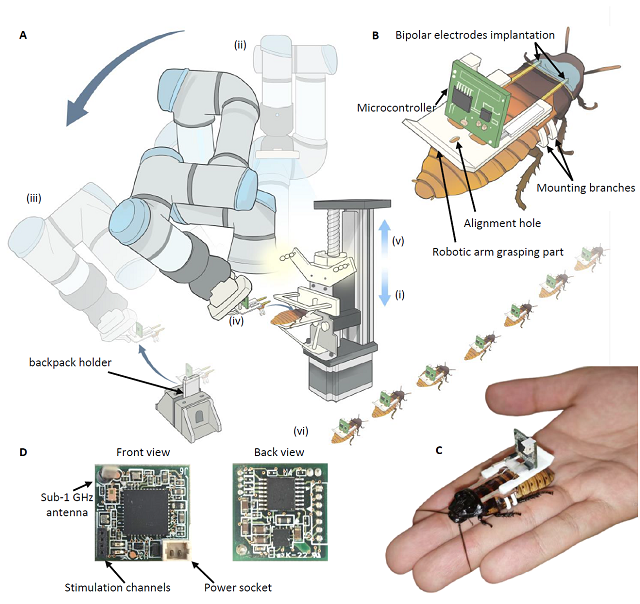
En lugar de usar las frágiles antenas , los científicos identificaron un punto de estimulación mucho más robusto y eficaz: la membrana intersegmental situada entre el pronoto (el «escudo» dorsal detrás de la cabeza) y el mesotórax de la cucaracha silbante de Madagascar.
Diseñaron una nueva generación de electrodos bipolares personalizados, fabricados mediante impresión 3D multimaterial y un proceso de metalización. Estos electrodos, equipados con microneedles y un gancho de anclaje, no solo garantizan una implantación segura, sino que además son más eficientes. El protocolo de estimulación requiere un 25% menos de voltaje que métodos anteriores, lo que aumenta la eficiencia energética y extiende el tiempo operativo.
Al aplicar un voltaje de solo 3.0 V, los investigadores lograron un control preciso. Una estimulación unilateral provoca giros cerrados de más de 70 grados , mientras que una estimulación simultánea en ambos lados logra, por primera vez, una desaceleración controlada, reduciendo la velocidad de la cucaracha en un 68.2%.
La línea de ensamblaje: cómo se crea un insecto-cyborg en 68 segundos
El corazón de este proyecto es el sistema de ensamblaje automatizado, que integra un brazo robótico, visión por computadora y una estructura de fijación a medida. El proceso es una coreografía de precisión:
- Fijación y preparación: Una cucaracha anestesiada se coloca en una estructura que expone con precisión la membrana intersegmental.
- Visión por computadora: Una cámara de alta resolución captura una imagen del insecto. Un modelo de inteligencia artificial (TransUNet), habilitado por un algoritmo propio, analiza la imagen e identifica el punto anatómico óptimo para la implantación de los electrodos.
- Ensamblaje robótico: Un brazo robótico UR3e, guiado por la visión artificial, recoge la «mochila» electrónica y, en un solo movimiento, implanta los electrodos y la fija al cuerpo del insecto.
El sistema completo puede ensamblar un insecto-cyborg en solo 68 segundos. Esto es aproximadamente 60 veces más rápido que el proceso manual tradicional. Al procesar cuatro insectos, el sistema completó todos los ensamblajes en menos de 8 minutos, unas 30 veces más rápido que un operario humano.
«Nuestra innovación hace que el sueño de desplegar un gran número de insectos-cyborg en escenarios de la vida real sea mucho más práctico», afirmó el profesor Sato. «Al automatizar el proceso, podemos producir robots híbridos insecto-computadora de forma rápida y consistente. Será fundamental en operaciones urgentes como la búsqueda y rescate tras un desastre».
Una vez que los insectos ya no están en una misión, las mochilas electrónicas pueden retirarse de forma segura sin efectos adversos.
Resultados en el mundo real: del laboratorio al terreno
La eficacia del sistema no solo se probó en el laboratorio, donde un robot fue capaz de seguir una trayectoria en forma de «S» o un enjambre de cuatro insectos-cyborg cubrió más del 80% de un área con obstáculos en poco más de 10 minutos, sino que también ha sido validado en una operación real.
Bautismo de fuego en una misión humanitaria
El 30 de marzo de 2025, un equipo de 10 insectos-cyborg fue desplegado en Myanmar junto con la Fuerza de Defensa Civil de Singapur (SCDF) como parte de su contingente de la Operación Corazón de León. La misión de ayuda humanitaria fue en respuesta a un devastador terremoto de magnitud 7,7.
Este despliegue marcó la primera vez que se utilizaron insectos-cyborg en una operación humanitaria, demostrando su potencial para localizar supervivientes en zonas de desastre donde los robots convencionales tendrían dificultades de acceso y autonomía.
«Con lo aprendido en nuestro despliegue sobre el terreno, ahora es esencial crear una infraestructura que soporte la producción y el despliegue masivos», señaló el profesor Sato. «Nuestra línea de montaje es el primer paso hacia ese objetivo».
Mirando hacia el futuro, el equipo tiene como objetivo mejorar el sistema de montaje e integrar sensores más complejos, como cámaras térmicas o micrófonos, en las mochilas para detectar señales humanas. La investigación, apoyada por el Programa de I+D Moonshot de JST, sienta las bases para un futuro en el que enjambres de estos biobots puedan ser ensamblados y desplegados rápidamente donde más se necesiten.
Contacto
Hirotaka Sato
School of Mechanical & Aerospace Engineering, Nanyang Technological University
Singapore
Email: hirosato@ntu.edu.sg
Referencia (acceso abierto)
Lin, Q., Vuong, N., Song, K. et al. Cyborg insect factory: automatic assembly for insect-computer hybrid robot via vision-guided robotic arm manipulation of custom bipolar electrodes. Nat Commun 16, 6073 (2025). https://doi.org/10.1038/s41467-025-60779-1
Editor y fundador de «Innovar o Morir». Milthon es Máster en Gestión de la Ciencia y la Innovación por la Universidad Politécnica de Valencia, con diplomas de especialización en Innovación Empresarial (UPV) y Gestión de la Innovación Orientada al Mercado (UPCH-Universitat Leipzig). Cuenta con experiencia práctica en la gestión de la innovación, habiendo liderado la Unidad de Innovación en Pesca del Programa Nacional de Innovación en Pesca y Acuicultura (PNIPA) y trabajado como consultor en diagnóstico para innovación abierta y vigilancia tecnológica. Cree firmemente en el poder de la innovación y la creatividad como motores de cambio y desarrollo.